![[转] 谈谈 C/C++ 中的 volatile](/assets/cpp-volatile.jpeg)
[转] 谈谈 C/C++ 中的 volatile
本文转载了一篇关于 volatile 关键字在多线程中用法的拨乱反正的文章。为了解决多线程编程中可能的 false sharing 问题,std::atomic 更推荐被使用。
![[转] 深入浅出 C++ 11 std::async](/assets/cpp-async.jpeg)
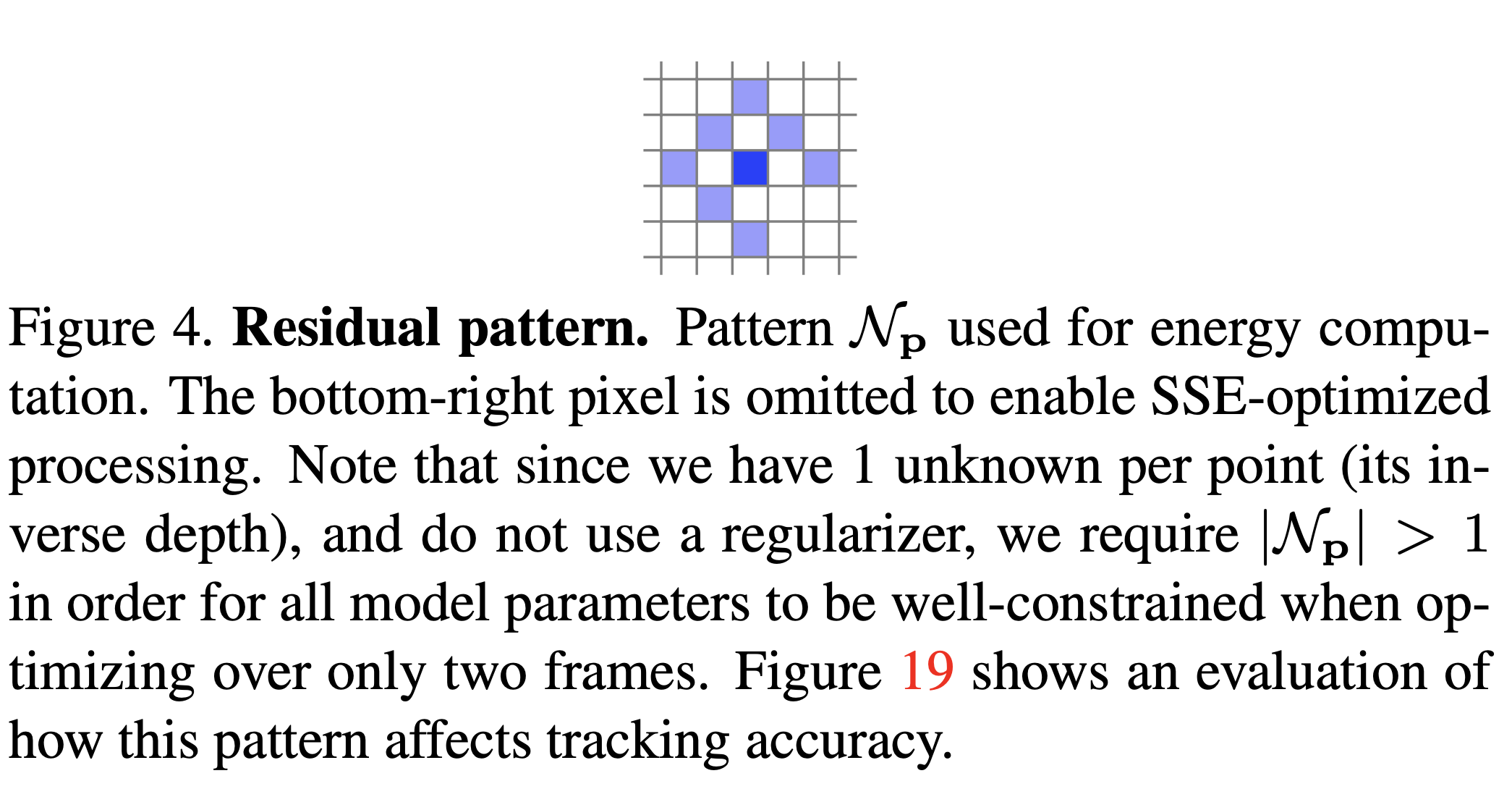
DSO 中 Residual pattern 的 SSE 加速
最近在阅读 DSO 论文的时候,在计算 residual 的时候,作者选取了一个奇怪的 pattern。作者提到,这是为了使用 SSE 加速而考虑的。SSE 又是什么呢?
本文转载了一篇关于 volatile 关键字在多线程中用法的拨乱反正的文章。为了解决多线程编程中可能的 false sharing 问题,std::atomic 更推荐被使用。
最近在阅读 DSO 论文的时候,在计算 residual 的时候,作者选取了一个奇怪的 pattern。作者提到,这是为了使用 SSE 加速而考虑的。SSE 又是什么呢?