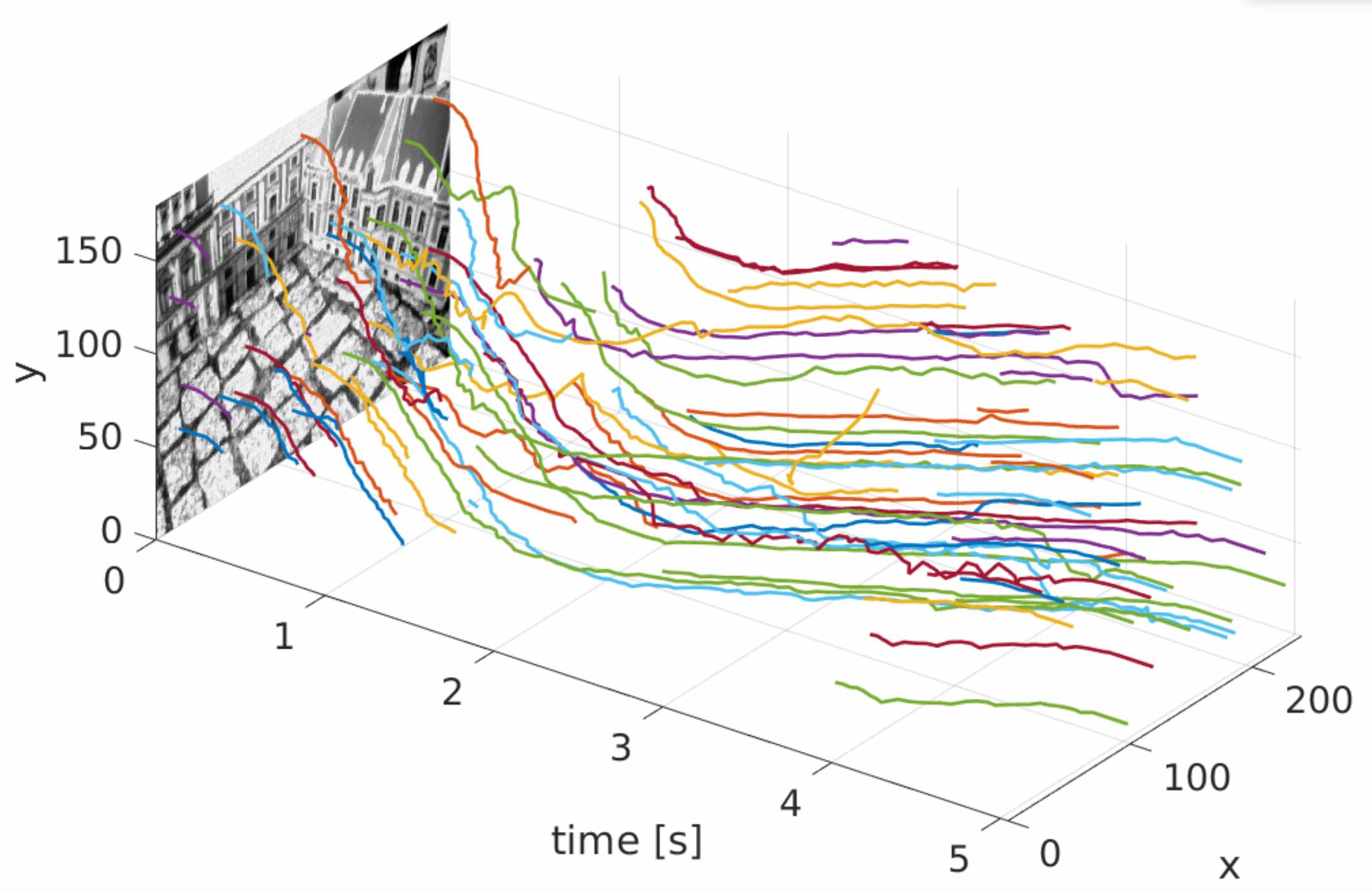
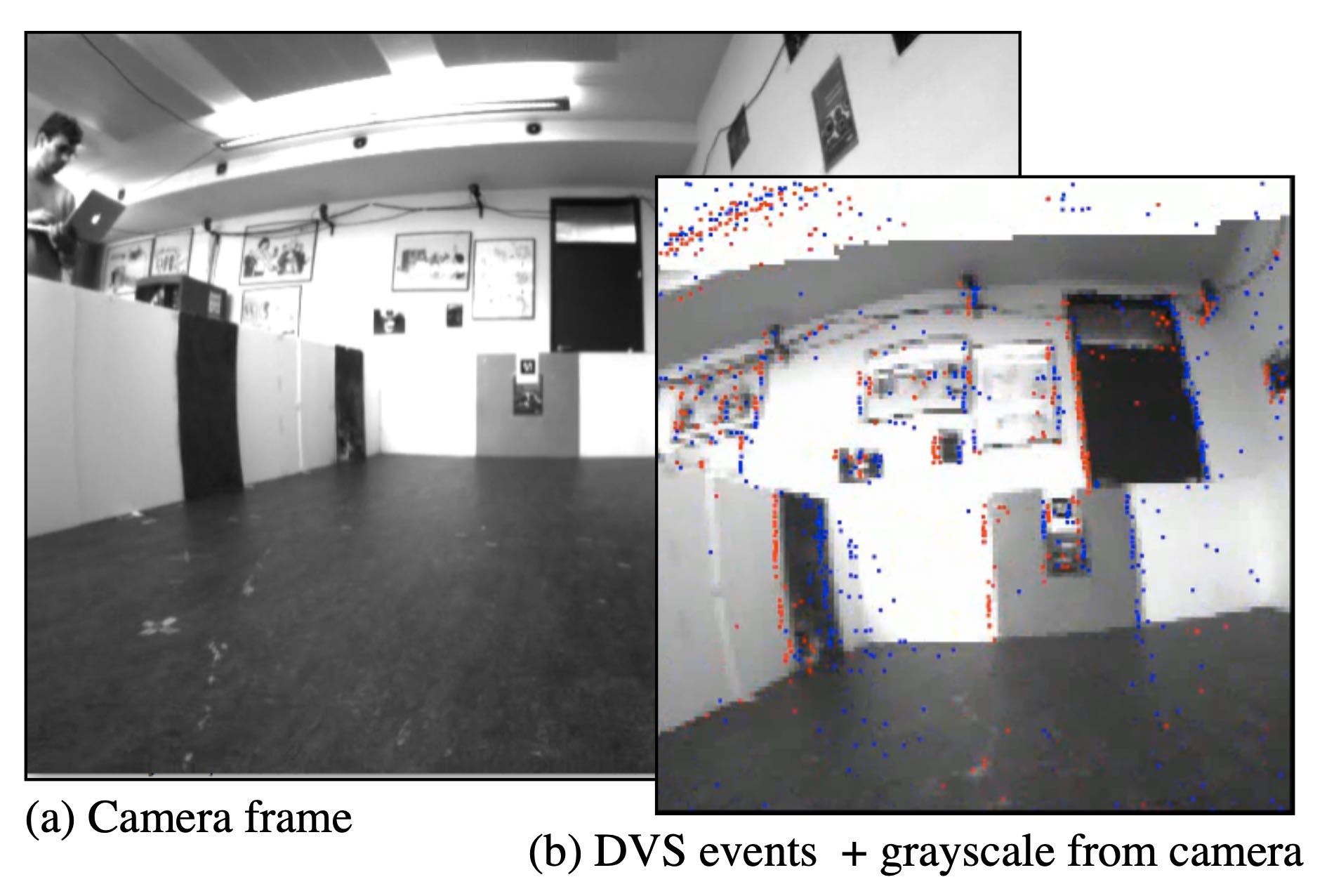
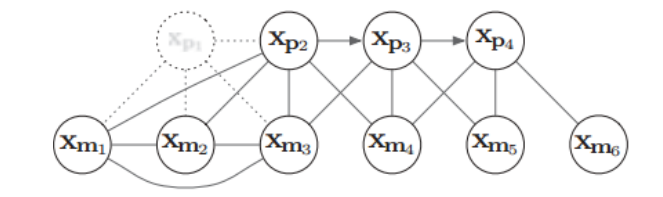
论文阅读 - Low-Latency Visual Odometry using Event-based Feature Tracks Low-Latency Visual Odometry using Event-based Feature Tracks 通过手工设计的 feature 和 feature tracking 的方法,将问题转化为传统 VO,但又不失 Event 带来的高速和异步的特性。 2020-03-04 Paper Reading Event-Camera 3D-Vision Odomerty
LOAM(A-LOAM)Laser-SLAM 算法流程 loam 是一个三维激光 SLAM 中很重要的一个方案,俗称 “loam 神器”。在这篇文章中我梳理了 loam 的算法流程,代码部分参考的是港科大 HKUST-Aerial-Robotics 组的实现版本:A-LOAM。 2020-02-26 SLAM 原理与实践 SLAM Robotics
论文阅读 - Event-based Camera 标定工作整理大全 本篇内容整理有: 有关 Event Camera Calibration 一些直接相关的工作和工具包 目前为止的主流的 Event-Camera 的数据集,整理了其中涉及多传感器外参标定的工作 在 Event Camera 的 VO/SLAM、目标检测的工作中,涉及到的多传感器、与传统 CMOS 相机标定的工作(未完,仍在继续整理) 目前为止的一些基于 Event 的 Video Synthes 2020-01-15 Paper Reading Event-Camera Calibration Multi-Sensors
Cartographer Laser-SLAM 算法流程解析与调优 本篇博客的目的是记录自己在实物机器人上调试 Cartographer 算法的过程中,参考的资料和结合部分代码,一些自己总结的内容。Cartographer 是 Google 开源的一个激光 SLAM 项目,有着非常惊艳的工程实现。 2019-12-07 SLAM 原理与实践 SLAM Robotics
VINS-Mono 中的边缘化操作理解 边缘化 (Marginalization),简单来说也就是删掉某些东西但是仍保存它的影响。比如最常见的求解 BA 的过程中,求解 H 矩阵时利用它的稀疏性进行的舒尔消元,就是把路标点 “忽略掉” 先求出相机的共视矩阵。这类 “忽略掉” 的操作就是所谓的 “边缘化”。 2019-11-25 SLAM 原理与实践 SLAM Robotics
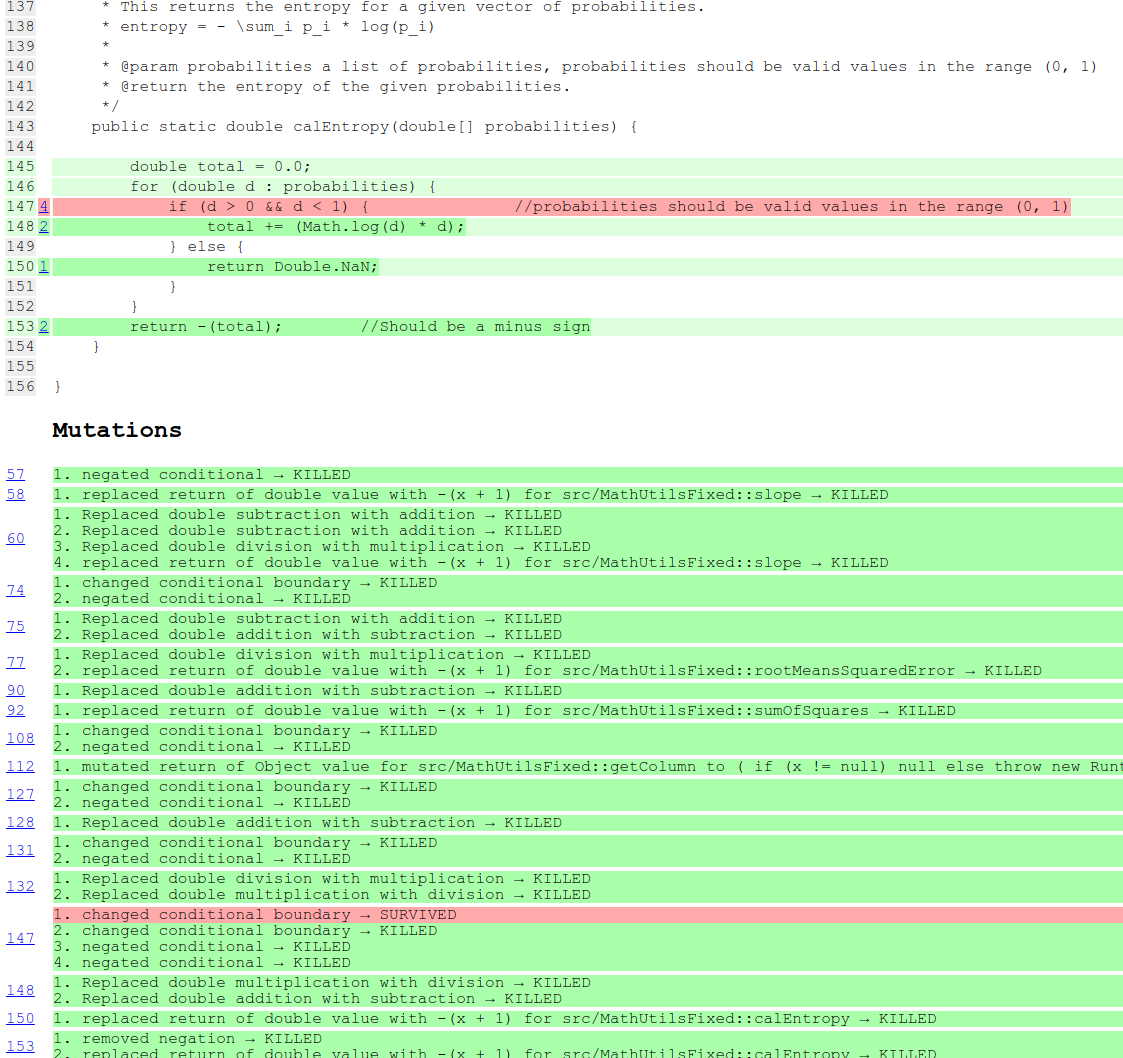
使用 Pitest 进行变异测试 使用 Pitest 进行变异测试 变异测试 (Mutation Testing) 变异测试是软件测试方法中的一个重要测试方法。变异测试旨在找出有效的测试用例。简单来说,就是对代码做一些简单的修改(变异),然后用同样的测试用例进行输入,看输出是否会发生改变。如果输出发生变化,即该变异 (mutation) 被 kill 掉,该 test case 就是有效的 test case;若所有测试用例扔 2019-11-22 Tools Software-Test
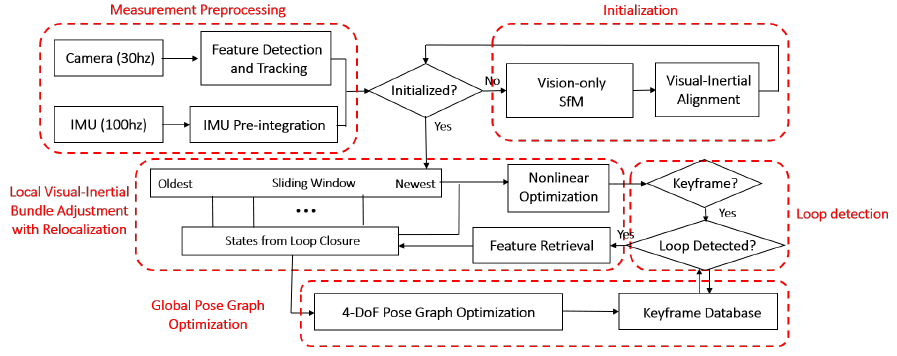
VINS-Mono 工作流程总结 本篇是我在学习 VINS-Mono 时对其工作流程的一个总结。VINS-Mono 的功能模块可包括五个部分:数据预处理、初始化、后端非线性优化、闭环检测及闭环优化。代码中主要开启了四个线程,分别是:前端图像跟踪、后端非线性优化 (其中初始化和 IMU 预积分在这个线程中) 、闭环检测、闭环优化。本人才学疏浅,有理解不深和错误的地方,请多多指教! 2019-10-25 SLAM 原理与实践 SLAM Robotics
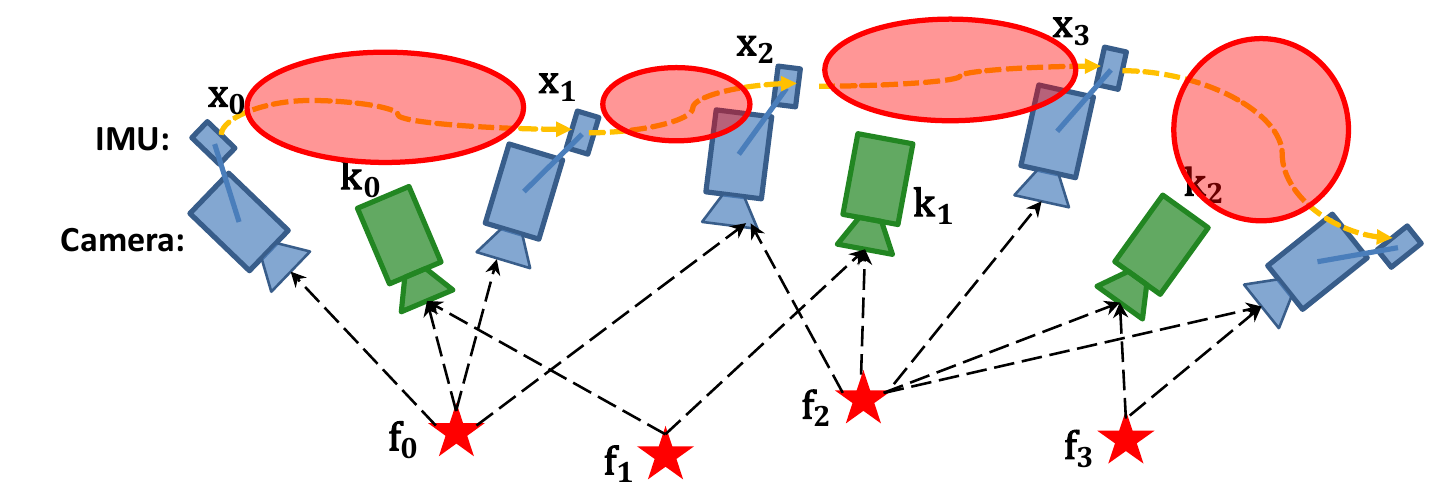
VINS-Mono 整体框架概述 VINS-Mono,即 Monocular Visual-Inertial SLAM,是港科大沈劭劼老师组开源的系统,主打 单目 + IMU。分别在 Robot 端和 IOS 端均做了实现并开源了出来。本篇为 VINS-Mono 框架的概览。本人才学疏浅,有理解不深和错误的地方,请多多指教! 2019-10-20 SLAM 原理与实践 SLAM Robotics
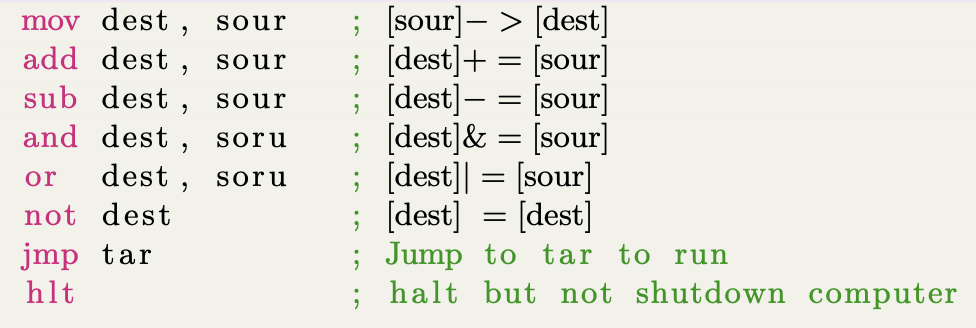
计算机组成原理 - 设计一个 CPU 计算机组成原理课程的一个大作业:设计一个符合下列要求的 CPU。完整项目请移步:https://github.com/kehanXue/Design-A-CPU。 2019-07-01 计算机组成原理 CPU Course
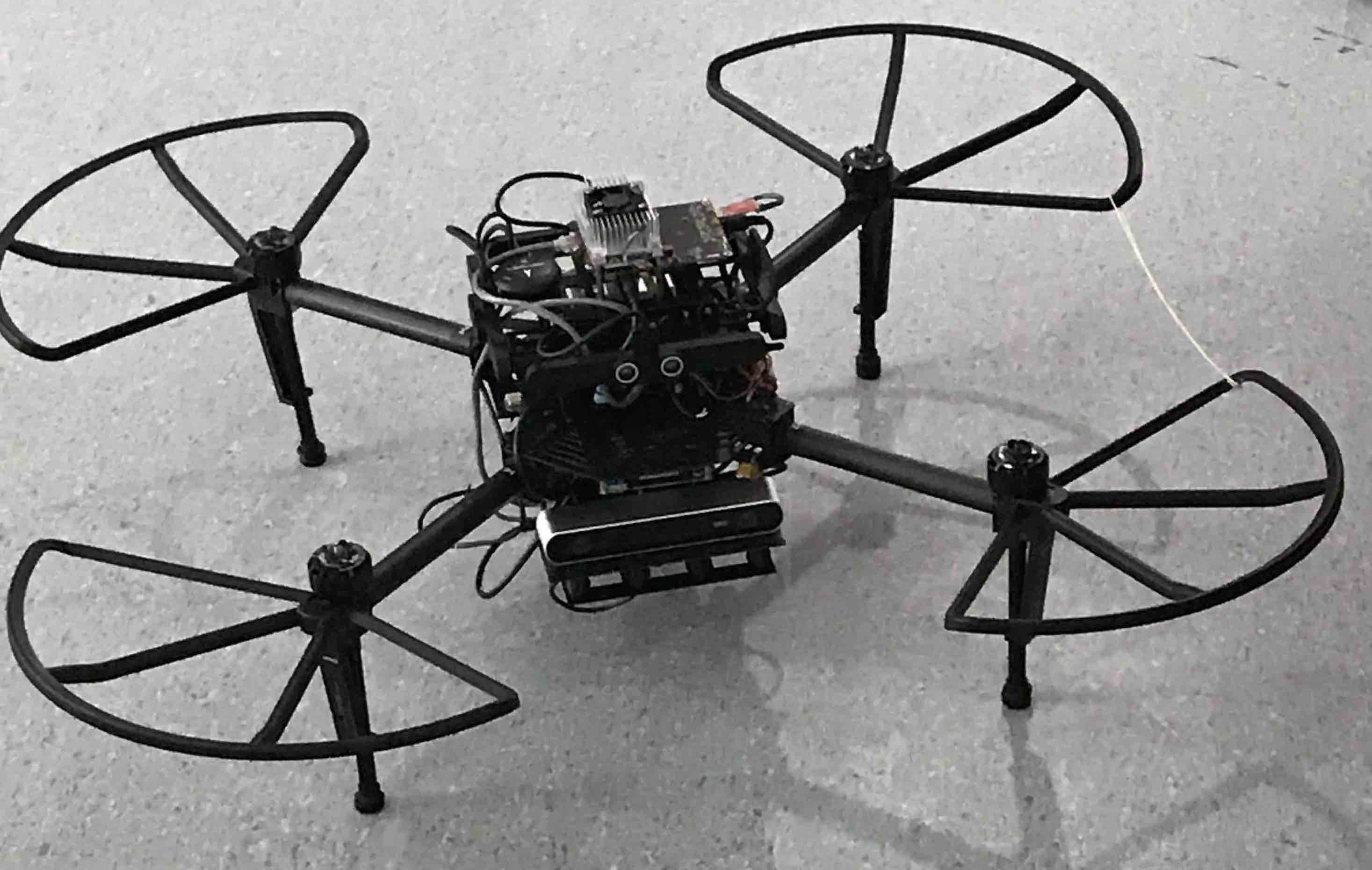
旋翼无人机平台搭建方案 飞行平台 1. 成品路线 物品名称 参考价 说明 DJI Matrix 100 ¥19999 大疆提供的开发者平台,稳定性极强,并且不差钱的话可以非常方便集成 dji 提供的相应套件 (比如 guidance). 优点: 稳定性强,非常好的机械结构设计,减震等做的非常好;安全性强;提供有较完善的 sdk 文档;平台扩展性强. 缺点: 闭源系统,无法自己随心所欲的加外设,并且有时候 2019-06-14 无人机 Robotics UAV